II.1.2 Rotation in XY plane and algebraic notations
One common operation in classical laminate analysis is to rotate vectors, tensors and matrices. One
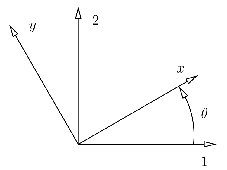
summarizes here the operations one uses in the rest of this Chapter and in FeResPost. This rotation is
represented in Figure II.1.3.
II.1.2.0.1 Rotation of base vectors
For such a rotation, the vectors
and are expressed
as a function of
and as:
|
|
To simplify the notations, one introduces the symbols
and
. Also,
one prefers to write the more general 3D version of the transformation:
|
| (II.1.1) |
The inverse relation corresponds to a rotation of angle
and is
obtained by changing the signs of the sinuses in the rotation matrix:
|
| (II.1.2) |
II.1.2.0.2 Transformation of vector and tensor components
The expressions (II.1.1) and (II.1.2) can be used to transform the components of vectors. For example:
|
| (II.1.3) |
For the transformation of 2D tensors, the transformation matrix is used twice. For example, a
Cauchy stress tensor is transformed as follows:
|
| (II.1.4) |
II.1.2.0.3 Matricial notations
As the Cauchy stress tensor is symmetric, expression (II.1.4) is more conveniently written in a
matricial form as follows:
|
| (II.1.5) |
The same expression applies to the components of the strain tensor, which is also symmetric:
|
|
However, unfortunately, the classical laminate analysis is universally written using angular shear
components for the strain tensor:
Using the angular components, the matricial expression to be used for the rotation becomes:
|
| (II.1.6) |
An interesting aspect of the transformations (II.1.5) and (II.1.6) is that one can apply the
transformation separately on sub-groups of components:
This contributes to justify some of the simplifications of the classical laminate analysis; among others,
the decoupling of in-plane and flexural deformation of the laminate on one hand from
the out-of-plane shear on the other hand. The third direction is systematically neglected:
. The
inverse of relation (II.1.7) is obviously;
|
| (II.1.9) |
|
|
II.1.2.0.4 Introduction of a short notation
In order to simplify the notations, one introduces the following notations:
|
|
|
|
|
|
|
|
|
| (II.1.10) |
These matrices are not independent. For example:
|
|
|
|
|
|
The transformations of the components of strain tensor (II.1.8) and stress tensor (II.1.9) are then
written:
Similarly, for the out-of-plane shear stresses and strains one writes the following relations: